內容提要:工業(yè)機器人已在汽車(chē)、電子等多個(gè)制造行業(yè)得到廣泛運用,且漸成規模之勢,這對當前及未來(lái)制造業(yè)就業(yè)格局和制造業(yè)從業(yè)者可能會(huì )產(chǎn)生重大影響。本文從其運用對企業(yè)員工、特別是制造業(yè)青年員工對工作安全感知的微觀(guān)視角出發(fā),借鑒此前他人的相關(guān)研究,選取職業(yè)能力成長(cháng)中的縱向發(fā)展維度和職業(yè)適應能力中的橫向學(xué)習能力維度作為兩個(gè)調節變量,利用上海、昆山、東莞、合肥等地數十家制造型企業(yè)273名員工的有效數據,研究了工業(yè)機器人規模運用對員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感所造成的影響。研究結果顯示:(1)工業(yè)機器人規模運用與員工工作不安全感之間為顯著(zhù)正相關(guān)關(guān)系;(2)職業(yè)能力發(fā)展和職業(yè)學(xué)習能力在工業(yè)機器人規模運用與員工工作喪失不安全感、過(guò)度競爭不安全感、薪酬晉升不安全感關(guān)系中均具有負向調節作用,即員工職業(yè)能力發(fā)展水平越高和職業(yè)學(xué)習能力越強,員工所感知到的工作不安全感受工業(yè)機器人規模運用影響便越小。最后,本文從政府、企業(yè)、員工三個(gè)角度提出了相關(guān)建議,期望可幫助員工降低因工業(yè)機器人規模運用所產(chǎn)生的工作不安全感。
關(guān)鍵詞:工業(yè)機器人;工作不安全感;職業(yè)能力發(fā)展;職業(yè)學(xué)習能力
基金項目:國家社會(huì )科學(xué)基金重點(diǎn)項目“數字經(jīng)濟對中國經(jīng)濟發(fā)展的影響研究”(18AZD006)。
一、引言
工業(yè)機器人具有生產(chǎn)精密性及精致性,可生產(chǎn)精密可靠的產(chǎn)品,實(shí)現人所不及的目標,應用場(chǎng)景已擴散到汽車(chē)、電子、冶金及印刷出版等眾多制造生產(chǎn)領(lǐng)域,其運用已漸成規模之勢。近年,關(guān)于機器人運用,已成為國內外研究熱點(diǎn),但就機器人運用對人工的替代、對就業(yè)總量及工作收入的影響而言,學(xué)術(shù)界還無(wú)法形成統一意見(jiàn);基本形成共識的是機器人規模應用對宏觀(guān)及各個(gè)層面的人力資源管理的重大影響正在日益顯現(周文斌,2017)[1]。有學(xué)者認為,機器人的使用雖然替代了一些人力勞動(dòng)崗位,但填補了人類(lèi)無(wú)法勝任的空缺崗位,且為大量新崗位的出現創(chuàng )造了機會(huì ),對勞動(dòng)力市場(chǎng)的最終影響是正向的,有利于社會(huì )就業(yè)水平凈擴張(Autor和Salomons,2017)[2];也有學(xué)者認為,機器人的使用會(huì )減少勞動(dòng)力需求并降低工作收入(Acemoglu和Restrepo,2016[3];2017[4];2018[5]),造成就業(yè)的極化分布并最終引致“階級失業(yè)”(Brynjolfsson和McAfee,2014[6];Autor,2015[7])。還有學(xué)者認為,我國很可能出現機器人對人工的大規模替代現象(馬嵐,2015)[8]。通過(guò)梳理既有研究文獻可以發(fā)現,對工業(yè)機器人規模運用的相關(guān)研究尚未觸及員工工作不安全感這一層面。
據《中國機器人產(chǎn)業(yè)發(fā)展報告(2017年)》顯示①,我國工業(yè)機器人市場(chǎng)發(fā)展較快,約占全球市場(chǎng)份額的三分之一,是全球第一大工業(yè)機器人應用市場(chǎng),市場(chǎng)潛力旺盛。工業(yè)機器人的規模運用將取代傳統單調、重復、低端的人力勞動(dòng)。本文研究者在2017年11月份對富士康昆山城南、城北工廠(chǎng)在工業(yè)機器人運用背景下企業(yè)用工狀況調研時(shí)發(fā)現,自采用工業(yè)機器人從事生產(chǎn)后,該企業(yè)將員工人數從11萬(wàn)人裁撤至不足5萬(wàn)人,裁撤率超過(guò)50%。仍留崗員工絕大多數表示,知曉當下的“機器代人”活動(dòng)并對此產(chǎn)生焦慮情緒。這說(shuō)明,工業(yè)機器人規模運用不可避免地影響著(zhù)制造行業(yè)員工既有的工作或工作特征的存續性。工作是立足之本,又是員工實(shí)現自身價(jià)值的最好載體,當員工對工作或工作特征的存續性感受到威脅或感知到焦慮擔憂(yōu)時(shí),往往就會(huì )產(chǎn)生工作不安全感(胡三嫚,2007)[9]。現有大量研究表明,工作不安全感負面效果顯著(zhù),不僅對員工身心健康、工作效率方面有嚴重的負面作用,還會(huì )蔓延到員工家庭領(lǐng)域和社交領(lǐng)域并產(chǎn)生一定的負面影響(馮玉鋒,2012[10];Barling,1998[11];Voydanoff,2004[12])。我國是世界第一大制造國,從事制造業(yè)人數達數億之多,制造行業(yè)員工的穩定關(guān)乎社會(huì )穩定。因此,本文將著(zhù)重考察工業(yè)機器人規模運用對員工工作不安全感的影響。
①《中國機器人產(chǎn)業(yè)發(fā)展報告(2017年)》是中國電子學(xué)會(huì )于2017年8月在北京召開(kāi)的世界機器人大會(huì )上發(fā)布的。
除了理論探索和實(shí)證分析工業(yè)機器人規模運用對員工工作不安全感的影響,本文還選取了職業(yè)能力發(fā)展和職業(yè)學(xué)習能力作為調節變量來(lái)解釋其中的調節作用。之所以選擇職業(yè)能力發(fā)展和職業(yè)學(xué)習能力作為調節變量,是因為:第一,職業(yè)能力發(fā)展是組織支持的表現,是員工最為關(guān)心的。員工職業(yè)能力發(fā)展越快、員工專(zhuān)業(yè)能力越強,崗位被替代的可能性越低(張瑋和劉延平,2015)[13];而職業(yè)學(xué)習能力反映員工主動(dòng)應對環(huán)境挑戰的能力,職業(yè)學(xué)習能力越強,員工適應能力越強(王益富等,2016)[14]。第二,關(guān)于員工職業(yè)能力發(fā)展和職業(yè)學(xué)習能力結果變量的研究表明,職業(yè)能力發(fā)展和職業(yè)學(xué)習能力的高低直接影響員工自身和組織的利益,也是影響員工職業(yè)偏好和決策的重要因素。若職業(yè)能力發(fā)展水平高,員工則具有較高的組織承諾、職業(yè)承諾(劉小平和王重鳴,2001[15];龍立榮等,2002[16]);若職業(yè)能力發(fā)展水平低,員工則容易沮喪并很容易產(chǎn)生離職念頭,對公司造成一定財產(chǎn)損失(Baker等,1989)[17]。而職業(yè)學(xué)習能力強的員工則會(huì )顯著(zhù)提升自身工作績(jì)效,并對自身職業(yè)生涯發(fā)展產(chǎn)生積極影響(Watts,2006[18];Rowold等,2008[19])。
綜上所述,從職業(yè)能力發(fā)展和職業(yè)學(xué)習能力角度研究工業(yè)機器人規模運用與員工工作不安全感之間可能存在的影響關(guān)系及調節作用,有利于員工和公司了解個(gè)體面對工業(yè)機器人規模運用時(shí)產(chǎn)生工作不安全感的個(gè)體差異和邊界機制,并進(jìn)一步提升對職業(yè)能力發(fā)展和職業(yè)學(xué)習能力的價(jià)值認識,實(shí)現員工公司雙贏(yíng),意義重大。
二、文獻回顧與假設提出
1.工業(yè)機器人
工業(yè)機器人是面向工業(yè)領(lǐng)域的機器人設備或產(chǎn)品(畢勝,2008)[20]。從技術(shù)角度來(lái)說(shuō),工業(yè)機器人是由操作機、控制器、伺服驅動(dòng)系統和檢測傳感器裝置構成的,是一種仿人操作、自動(dòng)控制、可重復編程、能在三維空間完成各種作業(yè)的機電一體化自動(dòng)化生產(chǎn)設備(解相吾和張林麗,2012)[21]。從經(jīng)濟應用角度來(lái)說(shuō),工業(yè)機器人是面向制造業(yè)領(lǐng)域的多關(guān)節機械手或多自由度機器人,是先進(jìn)制造業(yè)不可或缺的自動(dòng)化裝備(李丫丫和潘安,2017)[22]。
關(guān)于工業(yè)機器人發(fā)展前因變量的研究認為,技術(shù)多樣性、技術(shù)突破等因素推動(dòng)著(zhù)工業(yè)機器人產(chǎn)業(yè)的發(fā)展(Lechevalier等,2014[23];Yun等,2016[24])。政府主推與支持也是工業(yè)機器人發(fā)展的重要推動(dòng)因素。王京(2010)[25]對美國工業(yè)機器人發(fā)展計劃的研究發(fā)現,美國工業(yè)機器人產(chǎn)業(yè)發(fā)展起步早、具備有針對性的核心技術(shù)戰略規劃、軍民產(chǎn)業(yè)技術(shù)融合發(fā)展等因素是其機器人產(chǎn)業(yè)具有競爭力的重要原因。李剛(2014)[26]回顧和梳理了德國工業(yè)機器人發(fā)展歷程,發(fā)現政府引導和支持起了重要作用,從20世紀70年代提出的“改善勞動(dòng)計劃”到如今的工業(yè)4.0戰略,都為工業(yè)機器人產(chǎn)業(yè)發(fā)展發(fā)揮了政策導向作用。
關(guān)于工業(yè)機器人運用結果變量的研究表明,工業(yè)機器人促進(jìn)我國制造業(yè)生產(chǎn)率提升的機理得到了實(shí)證檢驗(李丫丫和潘安,2017)[22];工業(yè)機器人對勞動(dòng)和就業(yè)的影響,很可能使得我國出現機器人對人工的大規模替代現象(馬嵐,2015)[8],但工業(yè)機器人填補了部分人類(lèi)無(wú)法勝任的空缺崗位,且為大量新崗位的出現創(chuàng )造了機會(huì )。
2.工業(yè)機器人規模運用對員工工作不安全感的影響
對員工工作不安全感的研究始于Greenhalgh和Rosenblatt(1984)[27]。他們認為,工作不安全感是員工在受威脅的情境中對于保持現狀的無(wú)力感。胡三嫚(2007)[9]則認為,工作不安全感反映員工對于工作或工作特征的存續性受到威脅時(shí)的感知和擔憂(yōu)。
對工作不安全感前因變量的相關(guān)研究發(fā)現,員工個(gè)人外部環(huán)境的劇烈變化極易使員工產(chǎn)生工作不安全感,這種外部環(huán)境變化大體有三類(lèi):在組織外部因素方面,根據資源保護理論,個(gè)體具有獲取資源和保護資源的本性,當個(gè)體感知到無(wú)法獲取某些資源,或受到失去資源威脅及無(wú)力保護時(shí),會(huì )產(chǎn)生巨大心理壓力,從而引致工作不安全感(Hobfoll,2001)[28]。如技術(shù)變革、失業(yè)率變化等組織外部因素的變化會(huì )顯著(zhù)影響個(gè)人生存發(fā)展狀況,進(jìn)而影響到個(gè)人工作不安全感變化。Fullerton和Wallace(2007)[29]研究發(fā)現,在失業(yè)率得到控制后,民眾的工作不安全感便會(huì )降低。在組織層面方面,根據組織作用模型,組織變革的消極變化顯著(zhù)地影響組織內個(gè)人并致使其發(fā)生消極變化(Greenhalgh和Rosenblat,1984)[27]。如組織被兼并或破產(chǎn)、裁員、減薪等一系列變革容易讓員工感到工作不穩定性及自身角色缺少保障。Cyper等(2010)[30]研究發(fā)現,企業(yè)在削減用工數量時(shí),員工往往會(huì )產(chǎn)生工作不安全感,尤其是在公布裁員名單前。在職業(yè)崗位方面,角色模糊或沖突等因素增加了員工在工作中所面臨的不確定性,進(jìn)而導致員工不安全感的上升。角色沖突與員工工作不安全感呈顯著(zhù)正相關(guān)關(guān)系(Pasewark和Strawser,1996)[31]。
技術(shù)的快速發(fā)展,尤其是國家層面戰略大力支持,勢必會(huì )加速工業(yè)機器人規模運用趨勢的演化。工業(yè)機器人規模運用趨勢加速演化的結果往往是低端人力勞動(dòng)工作崗位的消失、失業(yè)率的波動(dòng)、人機為爭奪工作機會(huì )所引致的沖突和工作收入的降低(Acemoglu和Restrepo,2016[3];2017[4];2018[5]),而這些結果又與員工工作不安全感緊密相關(guān)。此外,社會(huì )就業(yè)量、就業(yè)結構和工作收入等方面的變化受機器人使用影響最直接(Autor和Salomons,2017[2];Acemoglu和Restrepo,2016[3];2017[4];Brynjolfsson和McAfee,2014[6];Autor,2015[7])。有鑒于此,本文將重點(diǎn)考察工業(yè)機器人規模運用對五維度工作不安全感(胡三嫚和李中斌,2010)[32]——工作喪失不安全感、過(guò)度競爭不安全感、薪酬晉升不安全感、人際關(guān)系不安全感和工作執行不安全感中前三個(gè)維度的影響,因此,本文提出如下假設:
H1a:工業(yè)機器人規模運用程度越高,員工工作喪失不安全感越高。
H1b:工業(yè)機器人規模運用程度越高,員工過(guò)度競爭不安全感越高。
H1c:工業(yè)機器人規模運用程度越高,員工薪酬晉升不安全感越高。
3.職業(yè)能力發(fā)展的調節作用
從嚴格意義上來(lái)講,職業(yè)能力發(fā)展是從職業(yè)成長(cháng)內涵中衍化出來(lái)的,屬于職業(yè)成長(cháng)概念范疇。職業(yè)成長(cháng)由Graen(1997)[33]提出,指個(gè)人在工作過(guò)程中向更有價(jià)值崗位靠攏邁進(jìn)的速度。Graen對職業(yè)成長(cháng)概念的界定表明,職業(yè)成長(cháng)是一個(gè)速度問(wèn)題,但其只關(guān)注了員工在工作轉換時(shí)的現象而忽視了在沒(méi)有工作轉換時(shí)的職業(yè)發(fā)展狀況。基于這種考慮,翁清雄和胡蓓(2009)[34]將職業(yè)成長(cháng)界定為員工職業(yè)成長(cháng)狀況,包含組織內職業(yè)成長(cháng)和組織外職業(yè)成長(cháng)兩個(gè)維度,反映在知識能力發(fā)展、職業(yè)目標進(jìn)展和組織內部晉升發(fā)展三個(gè)方面。袁慶宏和王雙龍(2010)[35]認為,職業(yè)成長(cháng)是員工在組織內部獲得成長(cháng)的機會(huì ),如獲得晉升機會(huì ),知識技能得到提升,經(jīng)驗更加豐富,承擔責任增加等。Yongmei等(2010)[36]指出,職業(yè)成長(cháng)是個(gè)體通過(guò)提升、擴展新技能和能力,同時(shí)承擔更多工作責任、角色以達到職業(yè)規劃的過(guò)程。翁清雄和席酉民(2011)[37]則進(jìn)一步將職業(yè)成長(cháng)內涵拓展至四種因素,包括職業(yè)目標進(jìn)展、職業(yè)能力發(fā)展、晉升速度和報酬增長(cháng)。雖然不同學(xué)者對職業(yè)成長(cháng)的理解有所不同,但無(wú)一例外都強調了技能提升和知識積累對職業(yè)成長(cháng)的影響作用。可以說(shuō),職業(yè)能力發(fā)展和職業(yè)成長(cháng)是緊密關(guān)聯(lián),難以割分的。
既有職業(yè)成長(cháng)結果變量研究發(fā)現,職業(yè)成長(cháng)對員工和組織發(fā)展都有重要影響,影響主要集中在三個(gè)方面,即組織承諾、職業(yè)承諾與離職傾向。在組織承諾方面,研究認為,職業(yè)成長(cháng)顯著(zhù)提高了員工的組織承諾。Alvi和Ahmed(1987)[38]發(fā)現,如果員工感知到自己在組織中的職業(yè)成長(cháng)空間較大時(shí),就具有較高組織承諾;龍立榮等(2002)[16]也發(fā)現,影響職業(yè)能力發(fā)展水平差異的培訓教育機會(huì )對組織承諾產(chǎn)生積極作用。在職業(yè)承諾方面,Baker等(1989)[17]指出,較好的職業(yè)成長(cháng)是影響人們職業(yè)偏好和決策的重要因素,若職業(yè)成長(cháng)較差則很容易降低職業(yè)承諾,進(jìn)而產(chǎn)生離職念頭。在離職傾向方面,大部分研究都證實(shí),員工職業(yè)成長(cháng)和離職傾向之間存在負向關(guān)系。翁清雄和胡蓓(2009)[34]研究發(fā)現,如果企業(yè)組織愿為員工職業(yè)成長(cháng)做出努力,則員工離職率會(huì )降低;Saporta和Farjoun(2003)[39]的研究表明,如果員工曾經(jīng)有較好的職業(yè)成長(cháng)經(jīng)歷,則其離職的可能性就較小;翁清雄和席酉民(2010)[40]發(fā)現,職業(yè)能力發(fā)展水平提高可降低員工離職傾向。職業(yè)成長(cháng)的作用不僅僅局限于此,Doeringer和Piore(1971)[41]研究發(fā)現,員工的職業(yè)成長(cháng)可以有效激勵其提高自身績(jì)效水平,進(jìn)而減少組織因培訓或離職而產(chǎn)生的成本,提升企業(yè)績(jì)效。
職業(yè)成長(cháng)問(wèn)題是員工職業(yè)生涯管理的核心問(wèn)題,不僅是知識型員工特別是新生代知識型員工應優(yōu)先考慮的問(wèn)題(周文斌和馬學(xué)忠,2015)[42],也是其他所有員工應優(yōu)先考慮的問(wèn)題。如前所述,高水平的職業(yè)成長(cháng)在員工職業(yè)發(fā)展過(guò)程中起著(zhù)積極作用。既有機器人運用相關(guān)研究表明,機器人使用對社會(huì )就業(yè)量、就業(yè)結構和工作收入變化具有最直接的影響(Autor和Salomons,2017[2];Acemoglu和Restrepo,2016[3];2017[4];Brynjolfsson和McAfee,2014[6];Autor,2015[7])。而員工能否實(shí)現就業(yè)及獲得薪酬晉升又與自身職業(yè)能力發(fā)展水平高低緊密相關(guān),職業(yè)能力發(fā)展水平較高的員工,實(shí)現就業(yè)和薪酬晉升的概率則較大;反之,則較小。因此,本文考察翁清雄和席酉民(2011)[37]職業(yè)成長(cháng)四維度——職業(yè)目標進(jìn)展、晉升速度、報酬增長(cháng)和職業(yè)能力發(fā)展中的職業(yè)能力發(fā)展對工業(yè)機器人規模運用與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感之間關(guān)系的調節作用,提出如下假設:
H2a:職業(yè)能力發(fā)展負向調節工業(yè)機器人規模運用與員工工作喪失不安全感之間關(guān)系,職業(yè)能力發(fā)展水平越高,工業(yè)機器人規模運用對員工工作喪失不安全感的正向影響越低。
H2b:職業(yè)能力發(fā)展負向調節工業(yè)機器人規模運用與員工過(guò)度競爭不安全感之間關(guān)系,職業(yè)能力發(fā)展水平越高,工業(yè)機器人規模運用對員工過(guò)度競爭不安全感的正向影響越低。
H2c:職業(yè)能力發(fā)展負向調節工業(yè)機器人規模運用與員工薪酬晉升不安全感之間關(guān)系,職業(yè)能力發(fā)展水平越高,工業(yè)機器人規模運用對員工薪酬晉升不安全感的正向影響越低。
4.職業(yè)學(xué)習能力的調節作用
作為職業(yè)適應能力關(guān)鍵組成部分的職業(yè)學(xué)習能力指個(gè)體能夠主動(dòng)利用機會(huì ),彌補自身知識技能的不足,勝任工作任務(wù)和職業(yè)發(fā)展要求,從而促進(jìn)職業(yè)發(fā)展的能力(王益富等,2016)[14]。職業(yè)學(xué)習能力的核心在于主動(dòng)學(xué)習、持續學(xué)習。現有研究表明,主動(dòng)學(xué)習、持續學(xué)習對員工的職業(yè)生涯發(fā)展有積極的正向作用。Watts(2006)[18]發(fā)現,個(gè)人自主進(jìn)行的持續學(xué)習活動(dòng)可有效提升自身受雇傭概率,提高自身職業(yè)生涯成功的可能性;Brown(2015)[43]發(fā)現,員工自主持續學(xué)習活動(dòng)對自身職業(yè)重建或職業(yè)轉型具有積極促進(jìn)作用。此外,主動(dòng)學(xué)習、持續學(xué)習可有效提升員工工作績(jì)效和勝任力。Rowold和Kauffeld(2009)[44]通過(guò)研究發(fā)現,藍領(lǐng)工人的正式職業(yè)生涯持續學(xué)習可有效提升他們在工作方法上的勝任力;非正式職業(yè)生涯持續學(xué)習則對其他各個(gè)方面的勝任力均有積極作用;呼叫中心員工參與培訓的積極性越高,他們的工作績(jì)效相應就越高(Rowold等,2008)[19]。
孟鴉君等(2010)[45]認為,在社會(huì )發(fā)生根本性變革時(shí),需要通過(guò)加強學(xué)習來(lái)重新改革工業(yè)經(jīng)濟中人力資源的開(kāi)發(fā)模式。而學(xué)習能力的強弱是影響學(xué)習效果的關(guān)鍵性因素,因此,職業(yè)學(xué)習能力的高低可直接決定人力資源開(kāi)發(fā)的質(zhì)量差異。在工業(yè)機器人規模運用背景下,大量重復低技能勞動(dòng)型工作崗位消失,意味著(zhù)對人力資源質(zhì)量要求更高。因此,本文將職業(yè)學(xué)習能力納入到調節變量中來(lái),提出如下假設:
H3a:職業(yè)學(xué)習能力負向調節工業(yè)機器人規模運用與員工工作喪失不安全感之間關(guān)系,職業(yè)學(xué)習能力越強,工業(yè)機器人規模運用對員工工作喪失不安全感的正向影響越弱。
H3b:職業(yè)學(xué)習能力負向調節工業(yè)機器人規模運用與員工過(guò)度競爭不安全感之間關(guān)系,職業(yè)學(xué)習能力越強,工業(yè)機器人規模運用對員工過(guò)度競爭不安全感的正向影響越弱。
H3c:職業(yè)學(xué)習能力負向調節工業(yè)機器人規模運用與員工薪酬晉升不安全感之間關(guān)系,職業(yè)學(xué)習能力越強,工業(yè)機器人規模運用對員工薪酬晉升不安全感的正向影響越弱。
三、量表構建
由于工業(yè)機器人規模運用尚處于初級階段,對工業(yè)機器人規模運用的特質(zhì)特征還缺乏相應的測量工具。有鑒于此,本文編制了相應的測量量表。量表編制共分為四個(gè)階段。
1.原始資料收集
研究者先分析相關(guān)研究文獻來(lái)了解熟悉工業(yè)機器人運用特點(diǎn),如應用范圍、應用可靠性等。然后,研究者深入機器人使用企業(yè)就“對機器人使用的了解程度和機器人規模運用可能性的指標有哪些”對企業(yè)員工和管理者進(jìn)行訪(fǎng)談。訪(fǎng)談主要以個(gè)別訪(fǎng)談方式進(jìn)行,對象包括上海達豐電腦有限公司、富士康(昆山)公司和昆山聯(lián)德精密機械有限公司三家企業(yè)7名中高層管理者、12名基層管理者和30名普通員工。
2.初始量表編制
研究者對訪(fǎng)談內容進(jìn)行匯總分類(lèi),并參考借鑒財務(wù)管理學(xué)中的成本—收益和項目可行性相關(guān)知識來(lái)篩選確定初始量表組成條目,形成了由七個(gè)條目組成的工業(yè)機器人運用初始量表。研究者請企業(yè)員工評定初始量表七個(gè)條目的可讀性,并據此做相應的語(yǔ)言修改。然后,請人力資源管理方面的研究專(zhuān)家(博士生導師一人)和企業(yè)員工(企業(yè)中高層管理者一人、企業(yè)基層管理者兩人和企業(yè)普通員工五人)來(lái)評定量表七個(gè)條目的適當性和科學(xué)性。最終,得到了由六個(gè)條目組成的工業(yè)機器人運用初始量表,包括“A1您對工業(yè)機器人替代勞動(dòng)力從事生產(chǎn)有了解嗎”“A2您對工業(yè)機器人運用將會(huì )越來(lái)越普遍認同嗎”“A3與人力相比,工業(yè)機器人運用范圍將會(huì )越來(lái)越廣”“A4與人力相比,工業(yè)機器人的運用成本越來(lái)越低”“A5與人力相比,工業(yè)機器人所創(chuàng )造價(jià)值越來(lái)越大”“A6與人力相比,工業(yè)機器人運用可靠性越來(lái)越強”,分別用來(lái)測量人們對工業(yè)機器人運用的了解程度和工業(yè)機器人的運用前景、運用范圍、成本、收益及可靠性。量表采用Likert-5評分法。
3.初始量表測量
本文收集了訪(fǎng)談的三家企業(yè)共282位員工數據作為樣本來(lái)檢驗初始量表的可靠性,樣本員工年齡大都集中于20~35歲之間。在SPSS22.0中,將數據樣本平均分為兩部分,每部分均為141個(gè)樣本,用第一份樣本進(jìn)行探索性因子分析,用第二份進(jìn)行樣本驗證性因子分析,兩部分樣本在性別、學(xué)歷、年齡、工作年限和工作崗位等方面都沒(méi)有顯著(zhù)差異性。
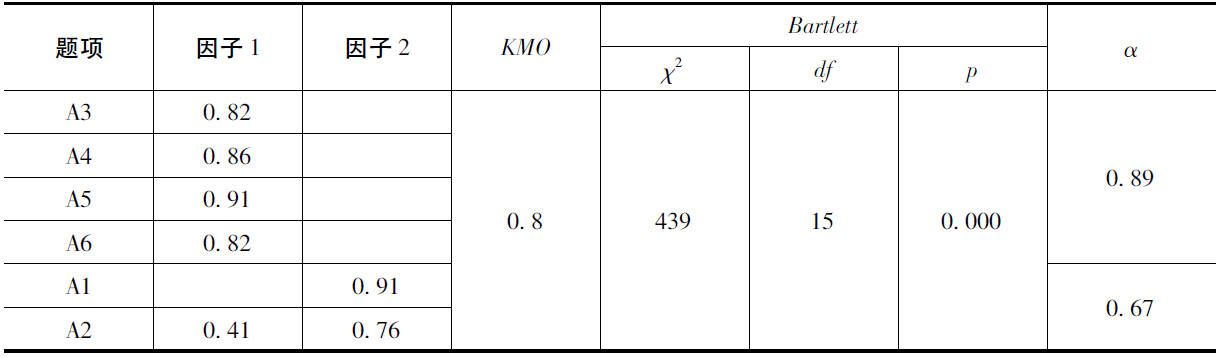
(1)探索性因子分析。在探索性因子分析過(guò)程中,根據碎石圖特征和特征值大于1的原則提取主成分,并采用最大方差法進(jìn)行旋轉。結果表明,六個(gè)條目項通過(guò)KMO和Bartlett球形檢驗,適合做因子分析。最終抽取兩個(gè)因子,分別命名為“工業(yè)機器人運用”和“對工業(yè)機器人運用了解”,其特征值分別為3.44和1.21,累積方差解釋率為77.54%,各個(gè)題項的因子載荷在0.76~0.92之間。對兩個(gè)因子做克隆巴赫α系數檢驗,結果分別為0.89和0.67。各項指標均可接受,具體結果如表1所示。
表1 探索性因子分析
資料來(lái)源:本文整理
(2)驗證性因子分析。本文采用AMOS22.0進(jìn)行驗證性因子分析,結果表明,χ2=14.66,df=8,TLI=0.969,CFI=0.983,GFI=0.965,AGFI=0.909,RMSEA=0.77,各標準化因子載荷在0.70~0.91之間,各項指標均可接受。進(jìn)一步計算因子的平均方差萃取量(AVE)和組合信度CR,并進(jìn)行區別效度檢驗,兩個(gè)因子的收斂效度和區別效度良好。具體結果如表2所示。
表2 效度驗證
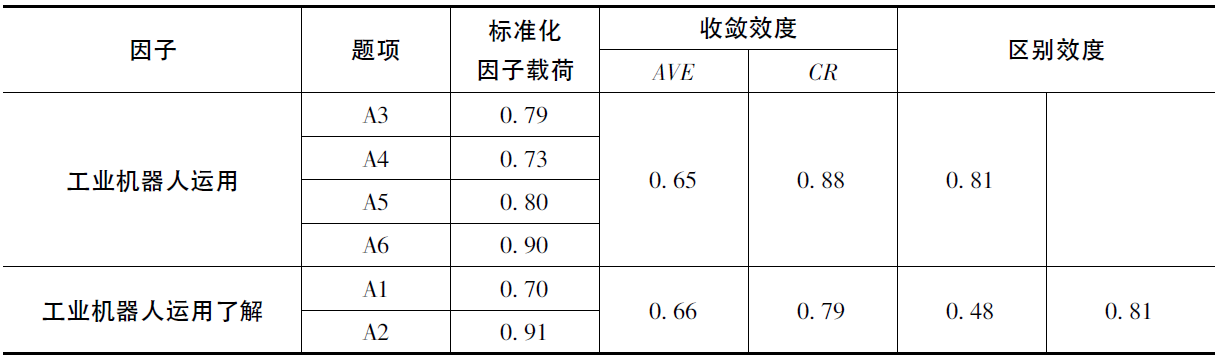
注:區別效度的對角線(xiàn)為因子AVE開(kāi)平方,下三角為兩個(gè)因子的相關(guān)系數
資料來(lái)源:本文整理
4.最終量表的確定
本文對初始量表提取了工業(yè)機器人運用和對工業(yè)機器人運用了解兩個(gè)維度。但由于對工業(yè)機器人運用了解維度與本文后續研究關(guān)聯(lián)不大,本文最終采用工業(yè)機器人運用維度四條目作為工業(yè)機器人規模運用量表來(lái)進(jìn)行后續測量分析。
四、研究設計
1.樣本收集
利用前述量表,對東莞、合肥等地區的多家制造企業(yè)進(jìn)行了網(wǎng)絡(luò )調查,并對上海、昆山等地區的多家企業(yè)展開(kāi)實(shí)地調研。調查共回收395份問(wèn)卷,在剔除了部分缺失值和明顯不符合常識的問(wèn)卷后,最終有效問(wèn)卷273份,有效回收率為69.11%。
在有效問(wèn)卷的樣本中,性別方面,男性占47.6%,女性占52.4%;學(xué)歷方面,大專(zhuān)及以下占78.8%,本科占15.0%,研究生占6.2%;工作年限方面,10年以下占77.7%,11~15年占15.0%,15年以上占7.3%;工作崗位方面,普工及技術(shù)技能工占87.5%,研發(fā)人員占9.9%,其他崗位包括管理層員工、財會(huì )出納、后勤設施服務(wù)員工等共占2.6%。
2.變量測量
(1)工業(yè)機器人規模運用。采用本文自編的工業(yè)機器人規模運用量表,量表α系數為0.753。
(2)職業(yè)能力發(fā)展。采用翁清雄和席酉民(2011)[37]編制的員工職業(yè)能力發(fā)展測量量表。量表由四個(gè)條目組成,包括“目前工作使我掌握新的與工作相關(guān)的技能”“目前工作使我積累了更豐富的工作經(jīng)驗”“目前工作使我不斷掌握新的與工作相關(guān)的知識”“目前工作使我的職業(yè)能力得到了不斷的鍛煉與提升”,分別用來(lái)測量員工的技能、知識、經(jīng)驗及職業(yè)能力。量表采用Likert-5點(diǎn)評分法。量表α系數為0.747。
(3)職業(yè)學(xué)習能力。采用王益富等(2016)[14]編制的職業(yè)學(xué)習能力量表。量表由三個(gè)條目組成,包括“你現有的專(zhuān)業(yè)知識和工作技能相對于崗位工作需要,相比如何”“你對新知識新技能的學(xué)習能力如何”“你經(jīng)驗總結與自我提升的能力如何”,分別用來(lái)測量員工—崗位匹配度、學(xué)習新知識新技能效率及自我提升度情況。量表采用Likert-7點(diǎn)評分法。量表α系數為0.793。
(4)工作不安全感。本文中的工作不安全感包括工作喪失不安全感、過(guò)度競爭不安全感及薪酬晉升不安全感三個(gè)維度,采用胡三嫚和李中斌(2010)[32]編制的工作不安全感量表。工作喪失不安全感由三個(gè)條目組成,包括“在目前工作崗位,失業(yè)的念頭令我擔憂(yōu)”“在目前工作崗位,我擔憂(yōu)我的工作不長(cháng)久”“在目前工作崗位,我擔憂(yōu)自己隨時(shí)可能都會(huì )失業(yè)”,用來(lái)測量員工對當前工作崗位存續性的看法。過(guò)度競爭不安全感由三個(gè)條目組成,包括“在目前工作崗位,我害怕很快被人所取代”“在目前工作崗位,我害怕自己沒(méi)有特別努力就會(huì )被單位淘汰”“在目前工作崗位,我害怕單位不斷地提對員工的要求”,用來(lái)測量員工對當前工作崗位技能要求的看法。薪酬晉升不安全感由三個(gè)條目組成,包括“在目前工作崗位,我擔憂(yōu)我的薪酬水平在未來(lái)是否還能提升”“在目前工作崗位,沒(méi)有獲得與我崗位對等的薪酬使我擔憂(yōu)”“在目前工作崗位,我擔憂(yōu)我能否一直保持目前的薪酬水平”,用來(lái)測量員工對當前工作崗位薪酬水平的看法。量表采用Likert-5點(diǎn)評分法。量表α系數為0.805。
(5)控制變量。根據單因素方差分析結果,本文控制變量包括性別(男=1,女=2)、學(xué)歷(高中及以下=1,大專(zhuān)=2,本科=3,研究生=4)、工作年限(不足1年=1,1~5年=2,6~10年=3,11~15年=4,15年以上=5)和工作崗位(普工=1,技術(shù)技能員工=2,研發(fā)員工=3,其他=4)
五、實(shí)證分析
1.各變量的驗證性因子分析
為考察各變量之間的獨立性,本文分別將工業(yè)機器人規模運用、職業(yè)能力發(fā)展、職業(yè)學(xué)習能力、工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感所構造的六因子模型、五因子模型、四因子模型、三因子模型、二因子模型和單因子模型進(jìn)行比對,使用Mplus7.0進(jìn)行驗證性因子分析。具體結果如表3所示。由表3可以看出,六因子模型的擬合指數情況最好,說(shuō)明本文中各變量之間具有較好的區分效度。
表3 各變量之間的驗證性因子比較
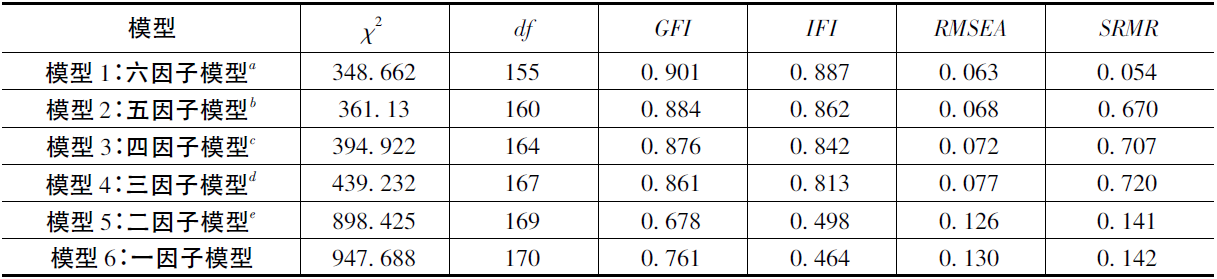
注:n=273;a:工業(yè)機器人規模運用(GY)、職業(yè)能力發(fā)展(ZN)、職業(yè)學(xué)習能力(ZX)、工作喪失不安全感(GS)、過(guò)度競爭不安全感(GD)和薪酬晉升不安全感(XC);b:GY、ZN+ZX、GS、GD和XC;c:GY、ZN+ZX、GS+GD和XC;d:GY、ZN+ZX、GS+GD+GD;e:GY和ZN+ZX+GS+GD+XC
資料來(lái)源:本文整理
2.共同方法偏差檢驗
為控制共同方法偏差,本文采用Harman單因素檢驗法來(lái)進(jìn)行共同偏差方法檢驗。結果表明,有六個(gè)因素的特征根大于1,且第一個(gè)因素解釋的累積變異量只有22.07%,遠小于40%的臨界值,說(shuō)明不存在嚴重的共同方法偏差問(wèn)題(周浩和龍立榮,2004)[46]。
3.相關(guān)分析
各研究變量之間的相關(guān)性分析結果如表4所示。由表4可以看出,工業(yè)機器人規模運用與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感之間均存在顯著(zhù)的正相關(guān)關(guān)系。職業(yè)能力發(fā)展與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感之間均存在顯著(zhù)的負相關(guān)關(guān)系。職業(yè)學(xué)習能力與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感之間均存在顯著(zhù)的負相關(guān)關(guān)系。
表4 變量均值、標準差及相關(guān)系數矩陣
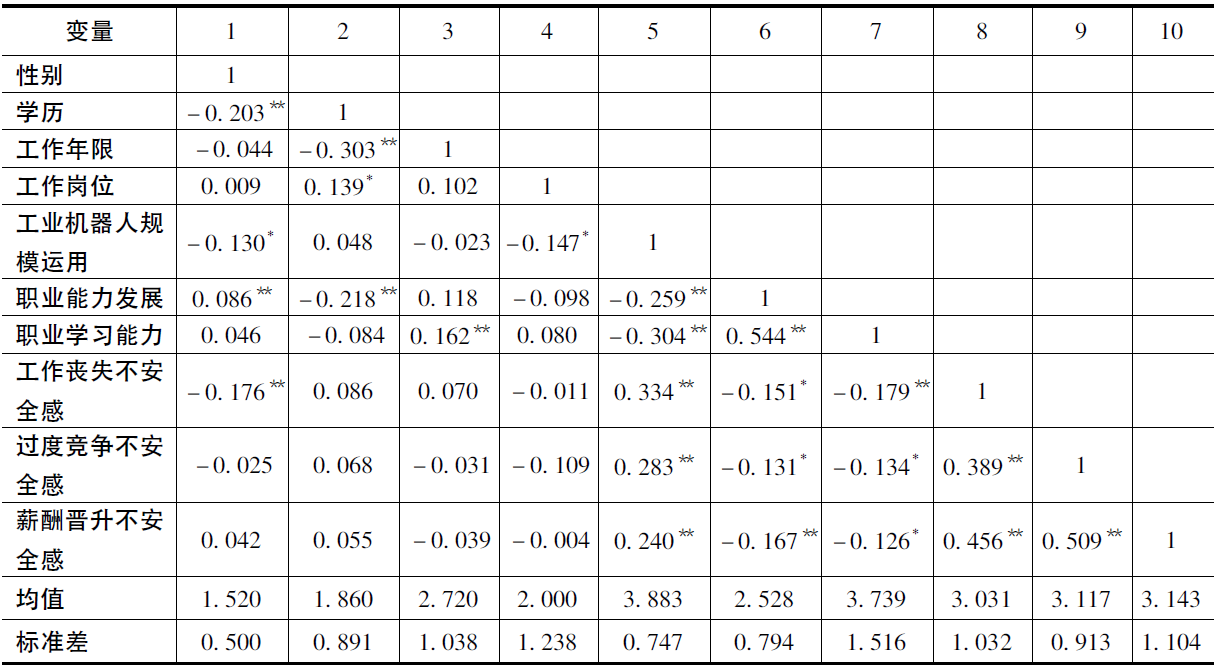
注:*p<0.05;**p<0.01;n=273
資料來(lái)源:本文整理
4.假設檢驗
以工業(yè)機器人規模運用為自變量,工作不安全感作為因變量,加入控制變量性別、學(xué)歷、工作年限和工作崗位進(jìn)行回歸分析來(lái)檢驗本文的系列假設,結果如表5所示。
表5 工業(yè)機器人規模運用對員工工作不安全感的回歸分析
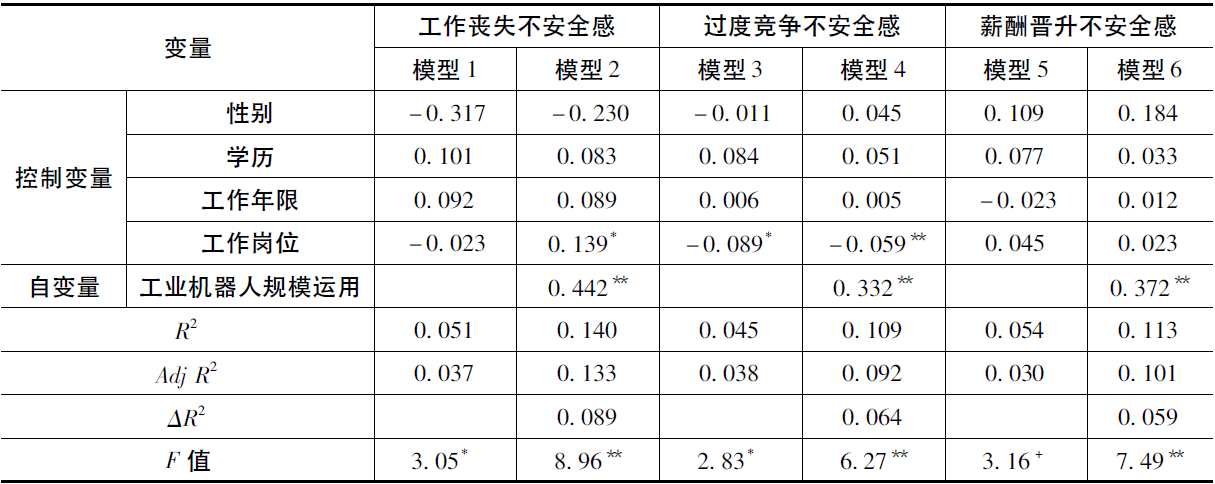
注:+p<0.1;*p<0.05;**p<0.01;n=273
資料來(lái)源:本文整理
從表5可以看出,加入工業(yè)機器人規模運用后的模型2比模型1對工作喪失不安全感的解釋力提高,ΔR2為0.089,調整后的R2為0.133,且回歸系數顯著(zhù)為正,說(shuō)明工業(yè)機器人規模運用程度越高,員工的工作喪失不安全感越大,驗證了假設H1a;模型4比模型3對過(guò)度競爭不安全感的解釋力提高,ΔR2為0.064,調整后的R2為0.092。回歸系數顯著(zhù)為正,說(shuō)明工業(yè)機器人規模運用越高,員工的過(guò)度競爭不安全感越大,假設H1b得到驗證;模型6比模型5對薪酬晉升不安全感的解釋力提高,ΔR2為0.059,調整后的R2為0.101。回歸系數顯著(zhù)為正,表明工業(yè)機器人規模運用程度越高,員工的薪酬晉升不安全感越大,驗證了假設H1c。
5.職業(yè)能力發(fā)展和職業(yè)學(xué)習能力調節作用檢驗
為驗證職業(yè)能力發(fā)展和職業(yè)學(xué)習能力對員工工作不安全感的調節作用,在表5檢驗的基礎上,將職業(yè)能力發(fā)展和職業(yè)學(xué)習能力放入回歸方程中。對相關(guān)變量進(jìn)行中心化處理以避免出現多重共線(xiàn)性現象,結果顯示,VIF最大值為1.15,說(shuō)明本文中的多重共線(xiàn)性現象并不嚴重。將經(jīng)過(guò)中心化處理的工業(yè)機器人規模運用和職業(yè)能力發(fā)展/職業(yè)學(xué)習能力的交互項放入回歸方程進(jìn)行檢驗,結果如表6所示。
表6 職業(yè)能力發(fā)展和職業(yè)學(xué)習能力調節檢驗的層次回歸結果
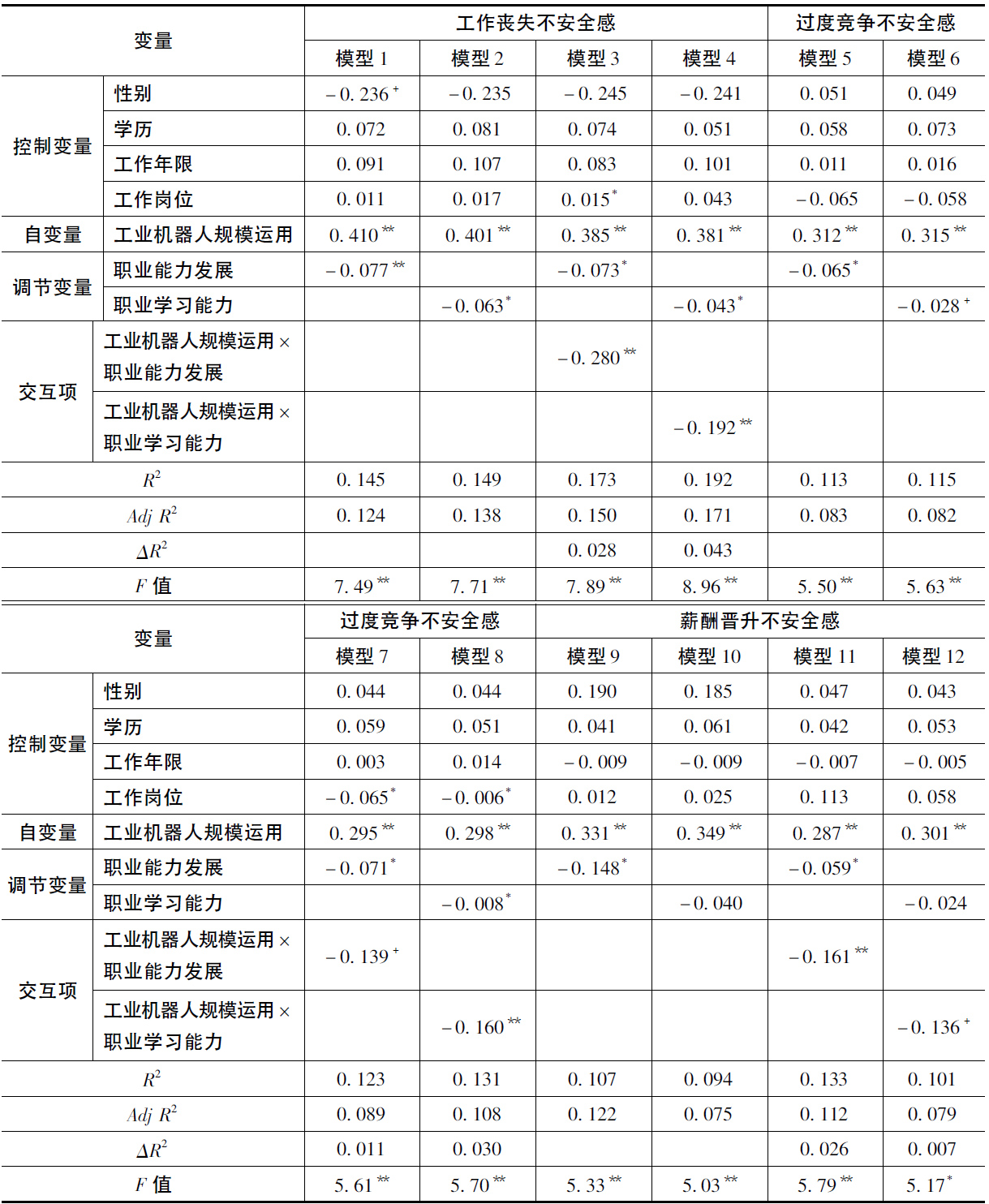
注:+p<0.1;*p<0.05;**p<0.01;n=273
資料來(lái)源:本文整理
從表6可以看出,模型3中的工業(yè)機器人規模運用與職業(yè)能力發(fā)展維度交互項回歸系數顯著(zhù)為負,且比模型1對工作喪失不安全感解釋力提高。模型4中的工業(yè)機器人規模運用與職業(yè)學(xué)習能力交互項回歸系數顯著(zhù)為負,且比模型2對工作喪失不安全感解釋力提高。這說(shuō)明,職業(yè)能力發(fā)展、職業(yè)學(xué)習能力對工業(yè)機器人規模運用與員工工作喪失不安全感之間關(guān)系具有負向調節作用,驗證了假設H2a及假設H3a。
模型7中的工業(yè)機器人規模運用與職業(yè)能力發(fā)展交互項回歸系數顯著(zhù)為負,且比模型5對過(guò)度競爭不安全感解釋力提高;模型8中的工業(yè)機器人規模運用與職業(yè)學(xué)習能力的交互項回歸系數顯著(zhù)為負,且比模型6對過(guò)度競爭不安全感的解釋力提高。這說(shuō)明,職業(yè)能力發(fā)展、職業(yè)學(xué)習能力對工業(yè)機器人規模運用與員工過(guò)度競爭不安全感之間關(guān)系具有負向調節作用,假設H2b、假設H3b得到了驗證。
在模型11中,工業(yè)機器人規模運用與職業(yè)能力發(fā)展交互項回歸系數顯著(zhù)為負,且比模型9對薪酬晉升不安全感解釋力提高;在模型12中,工業(yè)機器人規模運用與職業(yè)學(xué)習能力的交互項回歸系數顯著(zhù)為負,且比模型10對薪酬晉升不安全感的解釋力提高。這說(shuō)明,職業(yè)能力發(fā)展、職業(yè)學(xué)習能力對工業(yè)機器人規模運用與員工薪酬晉升不安全感之間關(guān)系具有負向調節作用,驗證了假設H2c和假設H3c。
為進(jìn)一步說(shuō)明職業(yè)能力發(fā)展和職業(yè)學(xué)習能力的調節作用,分別取高職業(yè)能力發(fā)展組(高于均值一個(gè)標準差)和低職業(yè)能力發(fā)展組(低于均值一個(gè)標準差)、高職業(yè)學(xué)習能力組(高于均值一個(gè)標準差)和低職業(yè)學(xué)習能力組(低于均值一個(gè)標準差)進(jìn)行回歸。對于高職業(yè)能力發(fā)展組,工業(yè)機器人規模運用對員工工作喪失不安全感的作用不顯著(zhù)(β=-0.159,p>0.1),對于低職業(yè)能力發(fā)展組,工業(yè)機器人規模運用與員工工作喪失不安全感顯著(zhù)正相關(guān)(β=0.487,p<0.01);對于高職業(yè)能力發(fā)展組,工業(yè)機器人規模運用對員工過(guò)度競爭不安全感的作用不顯著(zhù)(β=0.300,p>0.1),對于低職業(yè)能力發(fā)展組,工業(yè)機器人規模運用與員工過(guò)度競爭不安全感顯著(zhù)正相關(guān)(β=0.359,p<0.01);對于高職業(yè)能力發(fā)展組,工業(yè)機器人規模運用對員工薪酬晉升不安全感的作用不顯著(zhù)(β=0.304,p>0.1),對于低職業(yè)能力發(fā)展組,工業(yè)機器人規模運用與員工過(guò)度競爭不安全感顯著(zhù)正相關(guān)(β=0.358,p<0.01)。此外,對職業(yè)能力發(fā)展高低分組條件下的工作不安全感的回歸系數進(jìn)行兩斜率差異檢驗時(shí)發(fā)現,工作喪失不安全感的兩斜率差異檢驗Z=2.305(p<0.05),表明兩斜率具有差異性。
對于高職業(yè)學(xué)習能力組,工業(yè)機器人規模運用對員工工作喪失不安全感的作用不顯著(zhù)(β=0.101,p>0.1),對于低職業(yè)學(xué)習能力組,工業(yè)機器人規模運用與員工工作喪失不安全感顯著(zhù)正相關(guān)(β=0.519,p<0.01);對于高職業(yè)學(xué)習能力組,工業(yè)機器人規模運用對員工過(guò)度競爭不安全感的作用不顯著(zhù)(β=-0.059,p>0.1),對于低職業(yè)學(xué)習能力組,工業(yè)機器人規模運用與員工過(guò)度競爭不安全感顯著(zhù)正相關(guān)(β=0.398,p<0.01);對于高職業(yè)學(xué)習能力組,工業(yè)機器人規模運用對員工薪酬晉升不安全感的作用不顯著(zhù)(β=0.219,p>0.1),對于低職業(yè)學(xué)習能力組,工業(yè)機器人規模運用與員工過(guò)度競爭不安全感顯著(zhù)正相關(guān)(β=0.401,p<0.01)。此外,對職業(yè)學(xué)習能力高低分組條件下的工作不安全感的回歸系數進(jìn)行兩斜率差異檢驗時(shí)發(fā)現,工作喪失不安全感的兩斜率差異檢驗Z=2.041(p<0.05)和過(guò)度競爭不安全感的兩斜率差異檢驗Z=2.670(p<0.05),表明兩斜率具有差異性。
在不同職業(yè)能力發(fā)展和職業(yè)學(xué)習能力情況下,工業(yè)機器人規模運用與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感之間的關(guān)系如圖1~圖3所示。
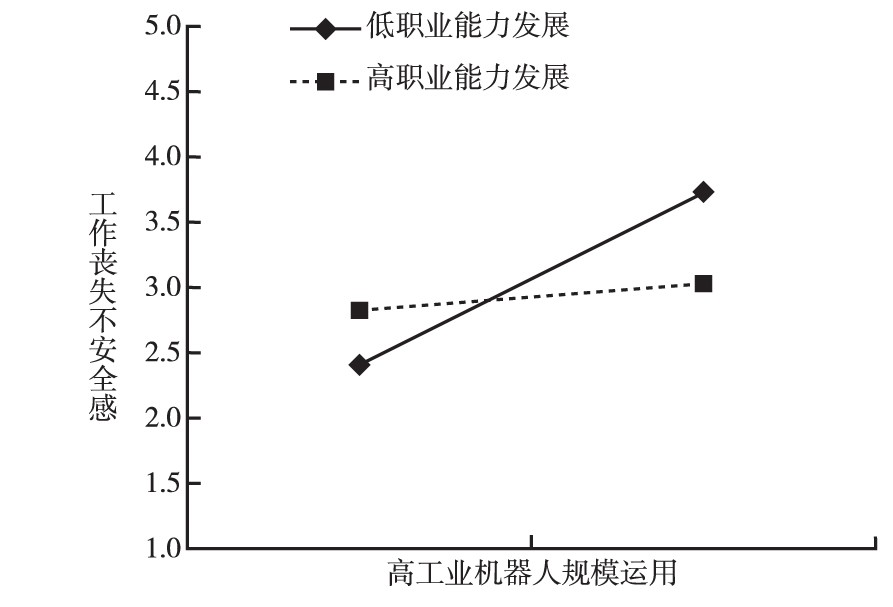
圖1a 職業(yè)能力發(fā)展對工業(yè)機器人規模運用與工作喪失不安全感關(guān)系的調節模式
資料來(lái)源:本文繪制
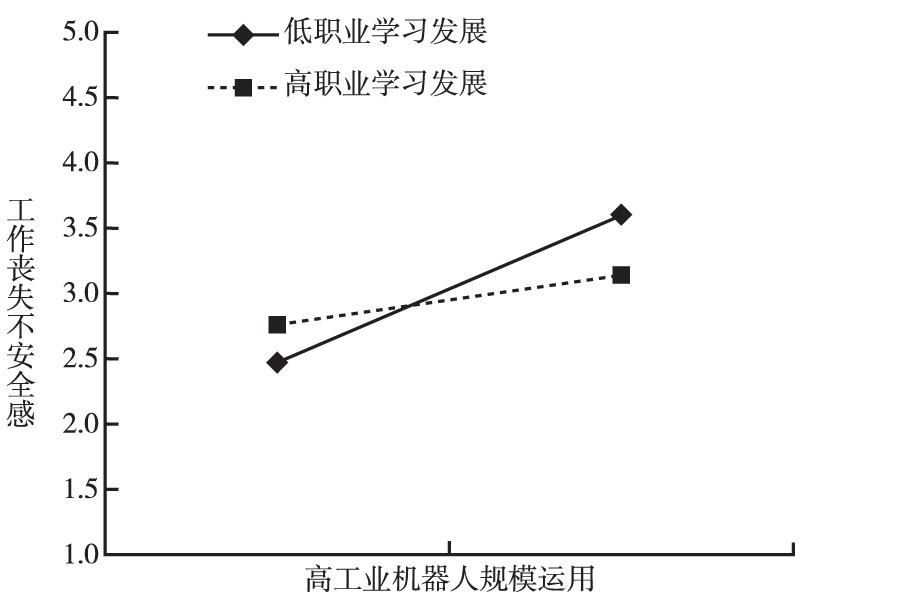
圖1b 職業(yè)學(xué)習能力對工業(yè)機器人規模運用與工作喪失不安全感關(guān)系的調節模式
資料來(lái)源:本文繪制
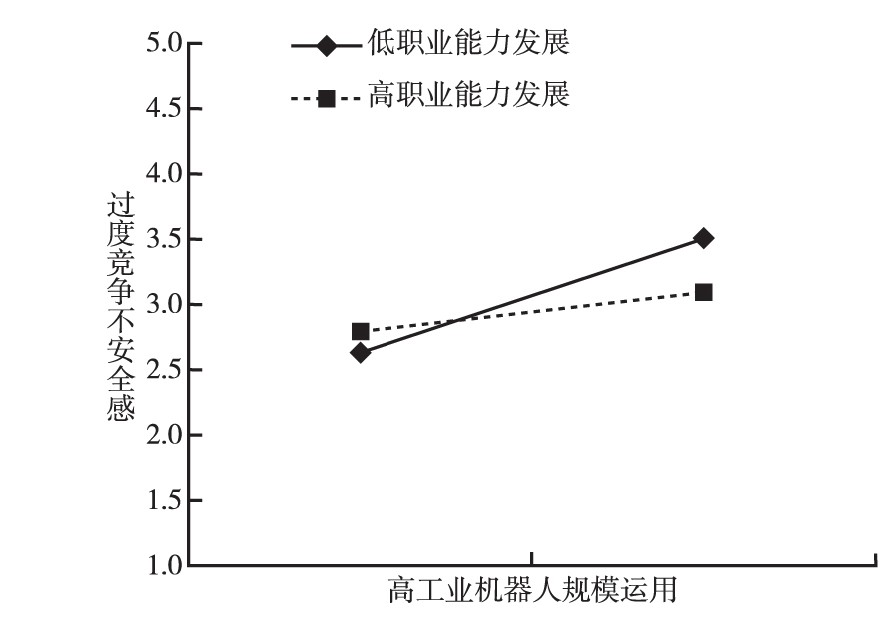
圖2a 職業(yè)能力發(fā)展對工業(yè)機器人規模運用與過(guò)度競爭不安全感關(guān)系的調節模式
資料來(lái)源:本文繪制
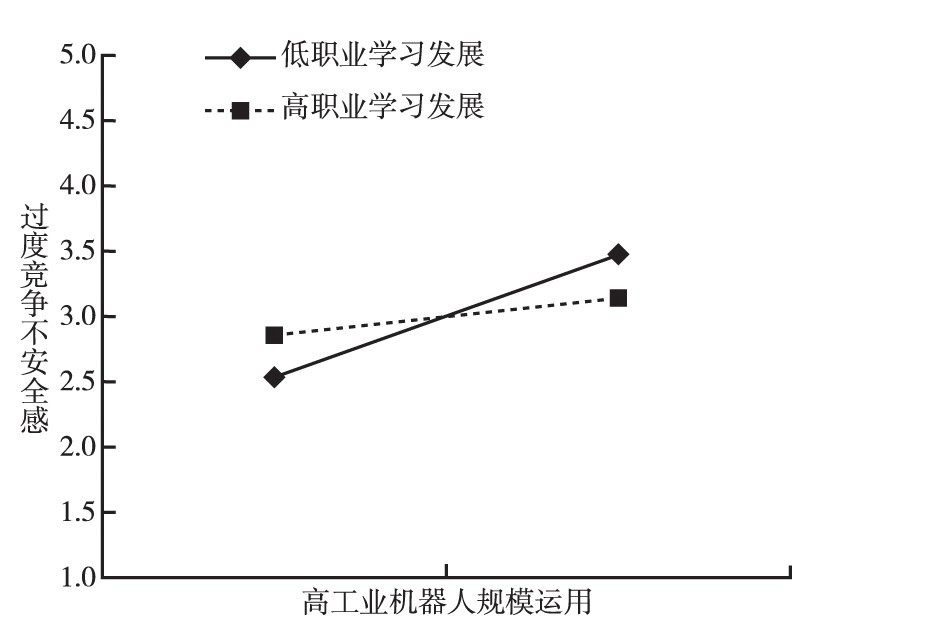
圖2b 職業(yè)學(xué)習能力對工業(yè)機器人規模運用與過(guò)度競爭不安全感關(guān)系的調節模式
資料來(lái)源:本文繪制
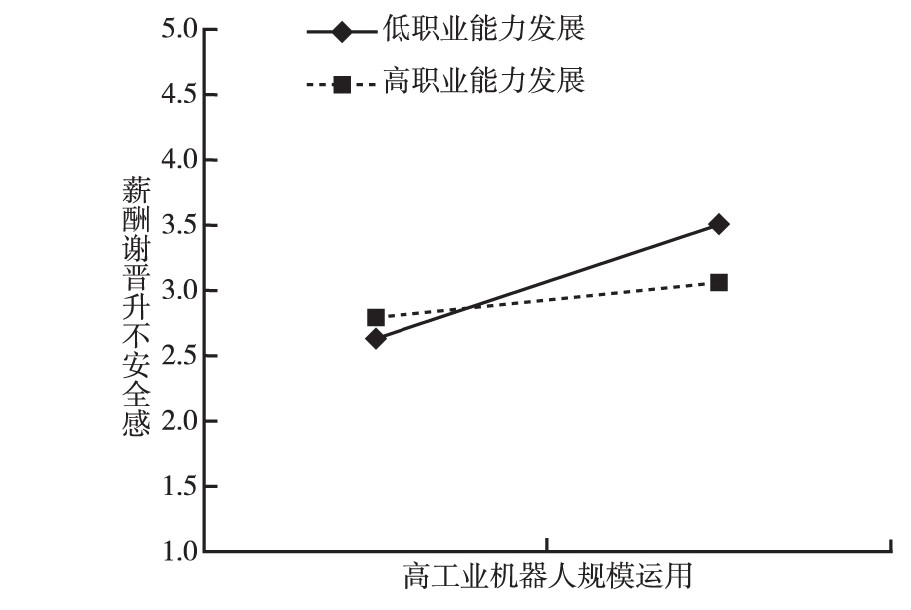
圖3a 職業(yè)能力發(fā)展對工業(yè)機器人規模運用與薪酬晉升不安全感關(guān)系的調節模式
資料來(lái)源:本文繪制
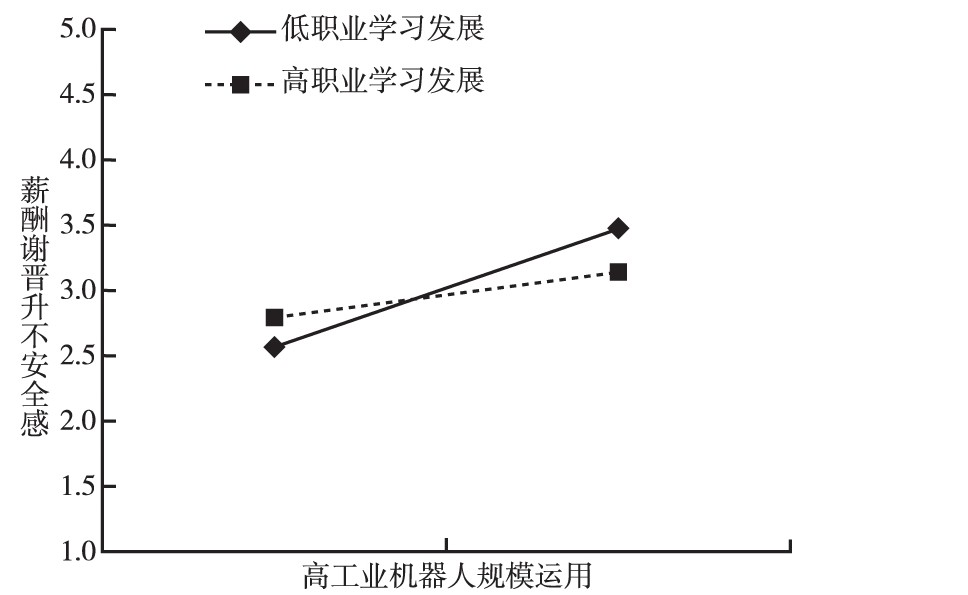
圖3b 職業(yè)學(xué)習能力對工業(yè)機器人規模運用與薪酬晉升不安全感關(guān)系的調節模式
資料來(lái)源:本文繪制
六、結論與討論
1.研究結論
本文分析了工業(yè)機器人規模運用、職業(yè)能力發(fā)展、職業(yè)學(xué)習能力和員工工作不安全感之間存在的影響關(guān)系。研究結果表明,工業(yè)機器人規模運用與員工工作不安全感之間存在顯著(zhù)的正相關(guān)關(guān)系,說(shuō)明工業(yè)機器人規模應用程度越高,員工工作不安全感越大。職業(yè)能力發(fā)展和職業(yè)學(xué)習能力對工業(yè)機器人規模運用與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感之間的關(guān)系起到了負向調節作用,即職業(yè)能力發(fā)展水平越高、職業(yè)學(xué)習能力越強,工業(yè)機器人規模運用對員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感的正向影響便越低。
2.理論意義
通過(guò)探索工業(yè)機器人規模運用與員工工作不安全感之間關(guān)系,以及職業(yè)能力發(fā)展和職業(yè)學(xué)習能力對二者之間關(guān)系的調節作用,本文豐富了人力資源管理相關(guān)領(lǐng)域的研究。
(1)編制的工業(yè)機器人規模運用度量表可供后來(lái)研究者借鑒。當下,對工業(yè)機器人運用的相關(guān)研究較多,但缺少關(guān)于工業(yè)機器人運用的度量表。本文結合工業(yè)機器人運用特點(diǎn)編制了關(guān)于工業(yè)機器人運用量表,并通過(guò)了驗證性因子分析和探索性因子分析等分析檢驗,為后來(lái)研究者進(jìn)一步研究工業(yè)機器人規模運用提供量表支持。
(2)從實(shí)證角度確認了工業(yè)機器人規模運用會(huì )對員工造成工作不安全感,彌補了既有研究不足。工業(yè)機器人規模運用是社會(huì )化趨勢,對就業(yè)結構和員工工作收入的沖擊不可避免,目前,對工業(yè)機器人的相關(guān)研究大都集中于此(Auto和Salomons,2017[2];Acemoglu和Restrepo,2016[3];2017[4];Brynjolfsson和McAfee,2014[6];Autor,2015[7])。從微觀(guān)層面對員工工作不安全感的影響研究卻寥寥無(wú)幾,而對員工工作不安全感的研究是人力資源管理領(lǐng)域不可或缺的一環(huán)。本文從實(shí)證角度確認了工業(yè)機器人規模運用與員工工作不安全感之間理論關(guān)系,有助于加深工業(yè)機器人規模運用對員工個(gè)人層面影響的理論了解。
(3)豐富了相關(guān)變量的理論研究成果。以往對工作不安全感前因變量的研究集中于組織內外部環(huán)境的變化,而較少從職業(yè)能力發(fā)展和職業(yè)學(xué)習能力角度來(lái)開(kāi)展相關(guān)研究。因此,將職業(yè)能力發(fā)展和職業(yè)學(xué)習能力納入到工作不安全感前因變量研究,探討職業(yè)能力發(fā)展和職業(yè)學(xué)習能力與工作不安全感之間可能存在的關(guān)系,不僅豐富既有工作不安全感相關(guān)理論研究成果,還進(jìn)一步發(fā)展職業(yè)成長(cháng)和職業(yè)適應能力的相關(guān)理論研究成果。
3.實(shí)踐價(jià)值
本文已證實(shí),工業(yè)機器人規模運用會(huì )造成給員工的工作不安全感,而職業(yè)能力發(fā)展和職業(yè)學(xué)習能力可負向調節這種工作不安全感。有鑒于此,本文從政府、企業(yè)和員工個(gè)人層面提出有關(guān)建議,希望有助于相關(guān)主體應對工業(yè)機器人規模運用所造成的負面影響:
(1)就政府而言,機器替代人只是剛剛起步,巨大的替代空間遠未顯現,因此,需要從國情出發(fā),高度重視就業(yè)安全,特別是青年員工的就業(yè)安全。就業(yè)是民生之本,也是家庭和基層社會(huì )安全之本。同時(shí),應促進(jìn)產(chǎn)業(yè)轉型和就業(yè)轉型同步進(jìn)行。我國正處于創(chuàng )新驅動(dòng)發(fā)展進(jìn)程中,機器人或人工智能在融入現有產(chǎn)業(yè),促進(jìn)產(chǎn)業(yè)轉型升級的同時(shí),替代了傳統重復、低端的勞動(dòng)力。機器人等人工智能的發(fā)展,帶來(lái)員工的不安全感上升。因此,政府可通過(guò)制定稅收優(yōu)惠政策等方式對企業(yè)主體組織的員工培養活動(dòng)給予資金支持;還可通過(guò)引導推動(dòng)第三產(chǎn)業(yè)的發(fā)展來(lái)創(chuàng )造新的就業(yè)機會(huì ),從而在一定程度上降低員工的不安全感。
(2)就企業(yè)而言,應確立適者生存原則和未來(lái)發(fā)展導向。機器人或人工智能時(shí)代,企業(yè)對機器人的運用是大勢所趨,而人才又是企業(yè)生存和發(fā)展最寶貴的資源。因此,從企業(yè)角度來(lái)看,在適應機器人時(shí)代要求的同時(shí),也要對員工進(jìn)行未來(lái)性引導。要強化企業(yè)內部的競爭機制,形成競爭性文化氛圍,促使員工正確看待機器人對勞動(dòng)力的替代。競爭機制的存在能激化員工的危機感,形成長(cháng)期的自我提升、自我學(xué)習慣性。企業(yè)應建立提升內部員工知識、技能和能力的常態(tài)化機制,培養員工掌握最新知識和技能,既提高員工工作能力又培養員工學(xué)習能力。企業(yè)應積極參與并與員工共同制定職業(yè)能力發(fā)展和學(xué)習成長(cháng)路徑,將員工職業(yè)能力發(fā)展和學(xué)習成長(cháng)納入企業(yè)發(fā)展目標。企業(yè)以組織資源幫助員工實(shí)現職業(yè)能力發(fā)展和學(xué)習成長(cháng),實(shí)現企業(yè)與員工共發(fā)展。
(3)就員工而言,應強化危機意識和自我提升意識。工業(yè)機器人的規模運用之所以會(huì )給員工帶來(lái)工作不安全感,實(shí)則是員工對自身技能、知識、能力不適應時(shí)代要求的一種認知。在機器人發(fā)展已然成為現實(shí)趨勢情況下,員工自身既要有危機意識,同時(shí)要保持積極的自我提升渴望。一是要關(guān)注并提高對職業(yè)能力發(fā)展和職業(yè)學(xué)習能力的價(jià)值認識。如前所述,職業(yè)能力發(fā)展和職業(yè)學(xué)習能力在工業(yè)機器人規模運用與員工工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感關(guān)系之間均具有負向調節作用。員工必須要將自身職業(yè)能力發(fā)展和職業(yè)學(xué)習能力放在突出位置,在工作中調動(dòng)一切可調動(dòng)的資源,提升自身職業(yè)能力發(fā)展及職業(yè)學(xué)習能力。二是要注重學(xué)習力的形成。學(xué)習動(dòng)力、學(xué)習毅力及學(xué)習能力等三要素的組合共同形成了學(xué)習力(Forrester,1965)[47],職業(yè)學(xué)習能力可負向調節工業(yè)機器人規模運用與工作喪失不安全感、薪酬晉升不安全感和薪酬晉升不安全感之間關(guān)系,類(lèi)似地,學(xué)習動(dòng)力及學(xué)習毅力可能也負向調節工業(yè)機器人規模運用與工作喪失不安全感、過(guò)度競爭不安全感和薪酬晉升不安全感關(guān)系。這就要求員工在工作中要提升職業(yè)學(xué)習能力,培養學(xué)習動(dòng)力和增強學(xué)習毅力,通過(guò)學(xué)習能力、學(xué)習動(dòng)力和學(xué)習毅力三者有效結合,形成強大的“學(xué)習力”。
七、研究局限與展望
受制于研究條件,本文仍有局限。一是研究對象的局限。本文的樣本主要取自于生產(chǎn)制造型企業(yè)普工、技術(shù)技能員工和研發(fā)人員,而對其它如基層管理、后勤和人力資源管理等崗位員工則取樣較少。隨著(zhù)技術(shù)發(fā)展,工業(yè)機器人運用范圍將日趨擴大,其對傳統單調、重復、低端人力勞動(dòng)的替代作用將進(jìn)一步增強。根據人力資源乘數原理,普工及技能技術(shù)員工遭裁減的背后,將會(huì )影響到與之相配套服務(wù)的基層管理、后勤和人力資源管理員工工作的存續性。因此,未來(lái)對員工不安全感的研究要增加對生產(chǎn)制造型企業(yè)其他崗位員工的取樣。二是研究范圍的局限。本文僅關(guān)注了工業(yè)機器人規模運用對員工工作不安全感的影響。由于工業(yè)機器人規模運用對企業(yè)人力資源管理所產(chǎn)生的影響是深遠、全方位的。因此,未來(lái)研究還可擴展到人力資源管理其他方面,如員工招聘、員工培訓和薪酬管理等。三是調節變量的拓展。工業(yè)機器人規模運用是不可扭轉的社會(huì )趨勢,其對當前及未來(lái)就業(yè)市場(chǎng)和就業(yè)格局的影響將會(huì )持續存在。既有研究表明(馮曉玲,2010[48];張燕等,2015[49];秦潤瑩,2016[50]),員工工作不安全感前因影響變量較多。因此,未來(lái)對員工工作不安全感的研究可從組織支持、組織培訓等更多變量角度來(lái)展開(kāi)。
參考文獻
[1]周文斌.機器人應用對人力資源管理的影響研究[J].南京大學(xué)學(xué)報(哲學(xué).人文科學(xué).社會(huì )科學(xué)),2017,(6):23-34.
[2]Autor,D.,and A.Salomons.Robocalypse Now——Does Productivity Growth Threaten Employment?[R].NBER Working Paper,2017.
[3]Acemoglu,D.,and P.Restrepo.The Race Between Machine and Man:Implications of Technology for Growth,Factor Shares and Employment[R].NBER Working Paper,2016.
[4]Acemoglu,D.,and P.Restrepo.Robots and Jobs:Evidence from US Labor Market[R].NBER Working Paper,2017.
[5]Acemoglu,D.,and P.Restrepo.Artificial Intelligence,Automation and Work[R].NBER Working Paper,2018.
[6]Brynjolfsson,E.,and A.McAfee.The Second Machine Age:Work,Progress,and Prosperity in a Time of Brilliant Technologies[M].New York:WW Norton and Company,2014.
[7]Autor,D.H.Why Are There Still So Many Jobs?The History and Future of Workplace Automation[J].Journal of Economic Perspectives,2015,29,(3):3-30.
[8]馬嵐.中國會(huì )出現機器人對人工的規模替代嗎?——基于日韓經(jīng)驗的實(shí)證研究[J].上海:世界經(jīng)濟研究,2015,(10):71-79.
[9]胡三嫚.工作不安全感的研究現狀與展望[J].北京:心理科學(xué)進(jìn)展,2007,(6):938-997.
[10]馮玉峰.工作不安全感、機會(huì )公平與員工工作敬業(yè)度關(guān)系研究——以模具制造企業(yè)高技能人才為例[D].大連:東北財經(jīng)大學(xué),2012.
[11]Barling,J.Effects of Parents’ Job Insecurity on Children’s Work Beliefs and Attitudes[J].Journal of Applied Psychology,1998,83,(1):112-118.
[12]Voydanoff,P.The Effects of Work Demands and Resources on Work-to-Family Conflict and Facilitation[J].Journal of Marriage and Family,2004,66,(2):398-412.
[13]張瑋,劉延平.組織文化對組織承諾的影響研究——職業(yè)成長(cháng)的中介作用檢驗[J].北京:管理評論,2015,(8):117-126.
[14]王益富,王麗麗,張建人,董薇.員工職業(yè)適應能力量表的編制及初步應用[J].北京:中國臨床心理學(xué)雜志,2016,(6):1021-1028.
[15]劉小平,王重鳴.組織承諾及其形成過(guò)程研究[J].天津:南開(kāi)管理評論,2001,(6):58-62.
[16]龍立榮,方俐洛,凌文輇.組織職業(yè)生涯管理與員工心理與行為的關(guān)系[J].北京:心理學(xué)報,2002,(1):97-105.
[17]Baker,D.D.,R.Ravichandran,and M.Dandall.Exploring Contrasting Formulation of Expectancy Theory[J].Decision Sciences,1989,1,(20):1-13.
[18]Watts,A.G.Career Development Learning and Employability[M].New York:Higher Education Academy,2006.
[19]Rowold,J.,S.Hochholdinger,and J.Schilling.Effect of Career Related Continuous Learning:A Case Study[J].The Learning Organization,2008,15,(1):45-57.
[20]畢勝.國內外工業(yè)機器人的發(fā)展現狀[J].哈爾濱:機械工程師,2008,(7):5-8.
[21]解相吾,張林麗.機器人與大學(xué)生創(chuàng )新能力培養[J].南寧:大眾科技,2012,(2):146-148
[22]李丫丫,潘安.工業(yè)機器人進(jìn)口對中國制造業(yè)生產(chǎn)率提升的機理及實(shí)證研究[J].上海:世界經(jīng)濟研究,2017,(3):87-97.
[23]Lechevalier.S.,J.Nishimura,and C.Storze.Diversity in Patterns of Industry Evolution:How an Intrapreneurial Regime Contributed to The Emergence of The Service Robot Industry[J].Research Policy,2014,43,(10):1716-1729.
[24]Yun,J.J.,D.Won,E.Jeong,K.Park,J.Yang,and J.Park.The Relationship between Technology Business Model and Market in Autonomous Car and Intelligent Robot Industries[J].Technological Forecasting and Social Change,2016,2,(103):142-155.
[25]王京.美軍機器人戰略白皮書(shū)概覽[J].北京:機器人技術(shù)與應用,2010,(2):20-25.
[26]李剛.德國機器人發(fā)展歷史[J].上海:機電一體化,2014,(9):12-15.
[27]Greenhalgh,L.a(chǎn)nd Z.Rosenblatt.Job Insecurity:Toward Conceptual Clarity[J].Academy of Management Review,1984,9,(3):438-448.
[28]Hobfoll,S.E.Conservation of resource:A New Attempt at Conceptualizing Stress[J].American Psychologist,2001,50,(3):337-421
[29]Fullerton,A.S.,and M.Wallace.Traversing the Flexible Turn:US Workers’ Perception of Job Security,1977-2002[J].Social Science Research,2007,36,(1):201-221.
[30]Cyper,N.D.,H.D.Witte,T.V.Elst,and H.Yasmin.Objective Threat of Unemployment and Situational Uncertainty During a Restricting:Associations With Perceived Job Insecurity and Strain[J].Journal of Business and Psychology,2010,25,(1):75-85.
[31]Pasewark,W.R.,and J.R.Strawser.The Determinants and Outcomes Associate with Job Insecurity in a Professional Accounting Environment[J].Behavior Research in Accounting,1996,(8):91-113.
[32]胡三嫚,李中斌.企業(yè)員工工作不安全感的實(shí)證分析[J].南昌:心理學(xué)探新,2010,(2):79-85.
[33]Graen,G.B.Predicting Speed of Managerial Advancement over 23 years Using a Parametric Duration Analysis:A Test of Early Leader-member Exchange Early Job Performance,Early Career Success,and University Prestige[A].Best Papers Proceedings:Making Global Partnerships Work Association of Japanese Business Studies[C].The 10th Annual Meeting,Washington.DC:OMNIPRESS,1997.
[34]翁清雄,胡蓓.員工職業(yè)成長(cháng)的結構及其對離職傾向的影響[J].上海:工業(yè)工程與管理,2009,(1):14-21.
[35]袁慶宏,王雙龍.基于職業(yè)成長(cháng)的知識型員工離職研究[J].北京:未來(lái)與發(fā)展,2010,(4):57-60.
[36]Yongmei,L.,L.Jun,and W.Longzeng.Are You Willing and Able?Roles of Motivation,Power,and Politics in Career Growth[J].Journal of Management.2010,36,(6):1432-1460.
[37]翁清雄,席酉民.企業(yè)員工職業(yè)成長(cháng)研究:量表編制與效度檢驗[J].北京:管理評論,2011,(10):132-143.
[38]Alvi,H.L.,and S.W.Ahmed.Assessing Organizational Commitment in A Developing Country:Pakistan Case Study[J].Human Relations,1987,5,(40):267-280.
[39]Saporta,I.,and M.Farjoun.The Relationship between Actual Promotion and Turnover among Professional and Managerial Administrative Occupational Groups[J].Work and Occupations,2003,30,(3):255-280.
[40]翁清雄,席酉民.職業(yè)成長(cháng)理論研究簡(jiǎn)評[J].合肥:預測,2010,(6):1-7.
[41]Doeringer,P.,and M.Piore.Internal labor Markets and Manpower Analysis[M].Lexington:Lexington Books,1971.
[42]周文斌,馬學(xué)忠.員工職業(yè)成長(cháng)的組織公平影響研究——以組織支持感為中介變量[J].北京:經(jīng)濟管理,2015,(10):64-74.
[43]Brown,A.Mid-career Reframing:The Learning and Development Processes through Individuals Seek to Effect Major Career Changes[J].British Journal of Guidance and Counselling,2015,43,(3):278-291.
[44]Rowold,J.,and S.Kauffeld.Effect of Career-related Continuous Learning on Competencies[J].Personal Review,2009,38,(1),90-101.
[45]孟鴉君,常永才,曹浩文.試論工作崗位學(xué)習作為課程的意義[J].北京:成人高教學(xué)刊,2010,(3):50-53.
[46]周浩,龍立榮.共同方法偏差的統計檢驗與控制方法[J].北京:心理科學(xué)進(jìn)展,2004,(6):942-950.
[47]Forrester,J.A New Style of Company[R].Cambridge:A Speech in MIT,1965.
[48]馮曉玲.組織變革知覺(jué)對工作不安全感的影響過(guò)程研究[D].杭州:浙江大學(xué),2010.
[49]張燕,解蘊慧,王滬.組織公平感與員工工作行為:心理安全感的中介作用[J].北京大學(xué)學(xué)報(自然科學(xué)版),2015,(1):180-186.
[50]秦潤瑩.企業(yè)員工工作不安全感研究述評[J].北京:管理現代化,2016,(1):93-95.
王才,通訊作者,博士研究生,研究領(lǐng)域是人力資源管理、技術(shù)經(jīng)濟及管理,電子郵箱:1468881479@qq.com;
趙素芳,博士研究生,研究領(lǐng)域是人力資源管理,電子郵箱:zhaosufang222@126.com。